1 Introduction
This book is about using the power of computers to do things with geographic data. It teaches a range of spatial skills, including: reading, writing and manipulating geographic file formats; making static and interactive maps; and applying geocomputation to support more evidence-based decision making related to a range of geographic phenomena, from transport systems to ecosystems. By demonstrating how various geographic operations can be linked, in ‘code chunks’ that intersperse the prose, the book also teaches reproducible, open and thus scientific workflows.
The book is not just about using the wealth of existing tools for geocomputation: it’s also about understanding the structure of geographic datasets and software from processing them, and enabling the development of new tools. The approach we teach throughout, and programming techniques covered in Chapter 11 in particular, can remove constraints on your creativity imposed by software. After reading the book and completing the exercises you should feel empowered with a strong understanding of the possibilities opened up by R’s impressive geographic capabilities. By the end of the book, we hope you will be ready to apply your skills tackle real-world problems, to communicate your work in maps and code, and to participate in reproducible research and free software communities.
Over the last few decades free and open source software for geospatial (FOSS4G) has progressed at an astonishing rate. Thanks to organizations such as OSGeo, advanced geographic techniques are no longer the preserve of those with expensive hardware and software: anyone can now download and run high-performance software for geocomputation. Open source Geographic Information Systems (GIS), such as QGIS, have made geographic analysis accessible worldwide. GIS software products are powerful, but tend to emphasize a graphical user interface (GUI) approach over the command-line interface (CLI) approach advocated in this book. The ‘GUI-focus’ of many GIS products has unintended consequence of disabling many users from making their work full reproducible, a problem that can be overcome by calling ‘geoalgorithms’ contained in GIS software from the command line, as we’ll see in Chapter 10. A simplistic comparison between the different approaches is illustrated in Table 1.1.
| Attribute | Desktop GIS (GUI) | R |
|---|---|---|
| Home disciplines | Geography | Computing, Statistics |
| Software focus | Graphical User Interface | Command line |
| Reproducibility | Minimal | Maximal |
R is not the only language providing a CLI for geocomputation. Other command environments with powerful geographic capabilities exist, including Python, Julia, and JavaScript. We encourage curious readers to give them a try and to reproduce the examples in this book in other languages, perhaps with reference to the book Geocomputation with Python, the open access version of which is also hosted on geocompx.org. However, R has some advantages that make it well-suited to geocomputation. The ‘R-spatial stack’ is easy to install, has comprehensive and well-maintained core packages meaning less ‘context switching’ and more focus on techniques rather than getting the code working. R has ‘batteries included’ with statistical functions as part of the base installation and hundreds of well-maintained packages implementing many cutting edge methods. With R, you can dive and get things working with surprisingly few lines of code, and generate publication quality interactive maps thanks to excellent mapping packages, as outlined in Chapter 9.
This book is also motivated by the importance of reproducibility for scientific research. It aims to make reproducible geographic data analysis workflows more accessible, and demonstrate the power of open geospatial software available from the command-line. R provides ways to interface with other languages (Eddelbuettel and Balamuta 2018), enabling numerous spatial software libraries to be called from R, as explained in Section 1.2 and demonstrated in Chapter 10. Before going into the details of the software, however, it is worth taking a step back and thinking about what we mean by geocomputation.
Reproducibility is a major advantage of command-line interfaces, but what does it mean in practice? We define it as follows: “A process in which the same results can be generated by others using publicly accessible code.”
This may sound simple and easy to achieve (which it is if you carefully maintain your R code in script files), but has profound implications for teaching and the scientific process (Pebesma, Nüst, and Bivand 2012).1.1 What is geocomputation?
Geocomputation is the application and development of computational methods for geographic data processing, analysis, modeling and visualization with command-line tools and scripts, focused on performance, reproducibility and modularity. This definition encapsulates many of the key ideas in this book, building on the short history of the word, dating back to the first conference on the subject in 1996 when it entered the lexicon.1
What distinguished geocomputation from the (at the time) commonly used term ‘quantitative geography’ was its emphasis on “creative and experimental” applications (Longley et al. 1998) and the development of new tools and methods. In the words of Stan Openshaw, a pioneer in the field who was an advocate (and possibly originator) of the term, “GeoComputation is about using the various different types of geodata and about developing relevant geo-tools within the overall context of a ‘scientific’ approach” (Openshaw and Abrahart 2000). Building on this early definition, Geocomputation with R goes beyond data analysis and modeling to include the development of new tools and methods for work that is not just interesting academically but beneficial.
Our approach differs from early definitions of geocomputation in one important way, however: in its emphasis on reproducibility and collaboration. At the turn of the 21st Century, it was unrealistic to expect readers to be able to reproduce code examples, due to barriers preventing access to the necessary hardware, software and data. Fast-forward two decades and things have progressed rapidly. Anyone with access to a laptop with sufficient RAM (at least 8 GB recommended) can install and run software for geocomputation, and reproduce the contents of this book. Financial and hardware barriers to geocomputation that existed in 1990s and early 2000s, when high-performance computers were too expensive for most people, have been removed.2 Geocomputation is also more accessible because publicly accessible datasets are more widely available than ever before, as we will see in Chapter 8. Unlike early works in the field, all the work presented in this book is reproducible using code and example data supplied alongside the book, in R packages such as spData, the installation of which is covered in Chapter 2.
Geocomputation is closely related to other terms including: Geographic Information Science (GIScience); Geomatics; Geoinformatics; Spatial Information Science; Geoinformation Engineering (Longley 2015); and Spatial Data Science (SDS). Each term shares an emphasis on a ‘scientific’ (implying reproducible and falsifiable) approach influenced by GIS, although their origins and main fields of application differ. SDS, for example, emphasizes ‘data science’ skills and large datasets, while Geoinformatics tends to focus on data structures. But the overlaps between the terms are larger than the differences between them and we use geocomputation as a rough synonym encapsulating all of them: they all seek to use geographic data for applied scientific work. Unlike early users of the term, however, we do not seek to imply that there is any cohesive academic field called ‘Geocomputation’ (or ‘GeoComputation’ as Stan Openshaw called it).
Geocomputation is a recent term but is influenced by old ideas. It can be seen as a part of Geography, which has a 2000+ year history (Talbert 2014); and an extension of Geographic Information Systems (GIS) (Neteler and Mitasova 2008), which emerged in the 1960s (Coppock and Rhind 1991).
Geography has played an important role in explaining and influencing humanity’s relationship with the natural world long before the invention of the computer, however. Alexander von Humboldt’s travels to South America in the early 1800s illustrates this role: not only did the resulting observations lay the foundations for the traditions of physical and plant geography, they also paved the way towards policies to protect the natural world (Wulf 2015). This book aims to contribute to the ‘Geographic Tradition’ (Livingstone 1992) by harnessing the power of modern computers and open source software.
The book’s links to older disciplines were reflected in suggested titles for the book: Geography with R and R for GIS. Each has advantages. The former conveys the message that it comprises much more than just spatial data: non-spatial attribute data are inevitably interwoven with geometry data, and Geography is about more than where something is on the map. The latter communicates that this is a book about using R as a GIS, to perform spatial operations on geographic data (Bivand, Pebesma, and Gómez-Rubio 2013). However, the term GIS conveys some connotations (see Table 1.1) which simply fail to communicate one of R’s greatest strengths: its console-based ability to seamlessly switch between geographic and non-geographic data processing, modeling and visualization tasks. By contrast, the term geocomputation implies reproducible and creative programming. Of course, (geocomputational) algorithms are powerful tools that can become highly complex. However, all algorithms are composed of smaller parts. By teaching you its foundations and underlying structure, we aim to empower you to create your own innovative solutions to geographic data problems.
1.2 Why use R for geocomputation?
Early geographers used a variety of tools including barometers, compasses and sextants to advance knowledge about the world (Wulf 2015). It was only with the invention of the marine chronometer in 1761 that it became possible to calculate longitude at sea, enabling ships to take more direct routes.
Nowadays such lack of geographic data is hard to imagine. Every smartphone has a global positioning (GPS) receiver and a multitude of sensors on devices ranging from satellites and semi-autonomous vehicles to citizen scientists incessantly measure every part of the world. The rate of data produced is overwhelming. Autonomous vehicles, for example, can generate terrabytes of data daily. Remote sensing data from satellites has become too large to analyze the corresponding data with a single computer, leading to initiatives such as OpenEO.
This ‘geodata revolution’ drives demand for high performance computer hardware and efficient, scalable software to handle and extract signal from the noise, to understand and perhaps change the world. Spatial databases enable storage and generation of manageable subsets from the vast geographic data stores, making interfaces for gaining knowledge from them vital tools for the future. R is one such tool, with advanced analysis, modeling and visualization capabilities. In this context the focus of the book is not on the language itself (see Wickham 2019). Instead we use R as a ‘tool for the trade’ for understanding the world, similar to Humboldt’s use of tools to gain a deep understanding of nature in all its complexity and interconnections (see Wulf 2015). Although programming can seem like a reductionist activity, the aim is to teach geocomputation with R not only for fun, but for understanding the world.
R is a multi-platform, open source language and environment for statistical computing and graphics (r-project.org/). With a wide range of packages, R also supports advanced geospatial statistics, modeling and visualization. New integrated development environments (IDEs) such as RStudio have made R more user-friendly for many, easing map making with a panel dedicated to interactive visualization.
At its core, R is an object-oriented, functional programming language (Wickham 2019), and was specifically designed as an interactive interface to other software (Chambers 2016). The latter also includes many ‘bridges’ to a treasure trove of GIS software, ‘geolibraries’ and functions (see Chapter 10). It is thus ideal for quickly creating ‘geo-tools’, without needing to master lower level languages (compared to R) such as C, FORTRAN or Java (see Section 1.3). This can feel like breaking free from the metaphorical ‘glass ceiling’ imposed by GUI-based or proprietary geographic information systems (see Table 1.1 for a definition of GUI). Furthermore, R facilitates access to other languages: the packages Rcpp and reticulate enable access to C++ and Python code, for example. This means R can be used as a ‘bridge’ to a wide range of geospatial programs (see Section 1.3).
Another example showing R’s flexibility and evolving geographic capabilities is interactive map making. As we’ll see in Chapter 9, the statement that R has “limited interactive [plotting] facilities” (Bivand, Pebesma, and Gómez-Rubio 2013) is no longer true. This is demonstrated by the following code chunk, which creates Figure 1.1 (the functions that generate the plot are covered in Section 9.4).
library(leaflet)
popup = c("Robin", "Jakub", "Jannes")
leaflet() |>
addProviderTiles("NASAGIBS.ViirsEarthAtNight2012") |>
addMarkers(lng = c(-3, 23, 11),
lat = c(52, 53, 49),
popup = popup)FIGURE 1.1: The blue markers indicate where the authors are from. The basemap is a tiled image of the Earth at night provided by NASA. Interact with the online version at r.geocompx.org, for example by zooming in and clicking on the popups.
It would have been difficult to produce Figure 1.1 using R a few years ago, let alone as an interactive map. This illustrates R’s flexibility and how, thanks to developments such as knitr and leaflet, it can be used as an interface to other software, a theme that will recur throughout this book. The use of R code, therefore, enables teaching geocomputation with reference to reproducible examples representing real world phenomena, rather than just abstract concepts.
1.3 Software for geocomputation
R is a powerful language for geocomputation but there are many other options for geographic data analysis providing thousands of geographic functions. Awareness of other languages for geocomputation will help decide when a different tool may be more appropriate for a specific task, and place R in the wider geospatial ecosystem. This section briefly introduces the languages C++, Java and Python for geocomputation, in preparation for Chapter 10.
An important feature of R (and Python) is that it is an interpreted language. This is advantageous because it enables interactive programming in a Read–Eval–Print Loop (REPL): code entered into the console is immediately executed and the result is printed, rather than waiting for the intermediate stage of compilation. On the other hand, compiled languages such as C++ and Java tend to run faster (once they have been compiled).
C++ provides the basis for many GIS packages such as QGIS, GRASS GIS and SAGA so it is a sensible starting point. Well-written C++ is very fast, making it a good choice for performance-critical applications such as processing large geographic datasets, but is harder to learn than Python or R. C++ has become more accessible with the Rcpp package, which provides a good ‘way in’ to C programming for R users. Proficiency with such low-level languages opens the possibility of creating new, high-performance ‘geoalgorithms’ and a better understanding of how GIS software works (see Chapter 11). However, it is not necessary to learn C++ to use R for geocomputation.
Python is an important language for geocomputation especially because many Desktop GIS such as GRASS GIS, SAGA and QGIS provide a Python API (see Chapter 10). Like R, it is a popular tool for data science. Both languages are object-oriented, and have many areas of overlap, leading to initiatives such as the reticulate package that facilitates access to Python from R and the Ursa Labs initiative to support portable libraries to the benefit of the entire open source data science ecosystem.
In practice both R and Python have their strengths and to some extent which you use is less important than the domain of application and communication of results. Learning either will provide a head-start in learning the other. However, there are major advantages of R over Python for geocomputation. This includes its much better support of the geographic raster data model in the language itself (see Chapter 2) and corresponding visualization possibilities (see Chapters 2 and 9). Equally important, R has unparalleled support for statistics, including spatial statistics, with hundreds of packages (unmatched by Python) supporting thousands of statistical methods.
The major advantage of Python is that it is a general-purpose programming language. It is used in many domains, including desktop software, computer games, websites and data science. Python is often the only shared language between different (geocomputation) communities and can be seen as the ‘glue’ that holds many GIS programs together. Many geoalgorithms, including those in QGIS and ArcMap, can be accessed from the Python command line, making it well-suited as a starter language for command-line GIS.3
For spatial statistics and predictive modeling, however, R is second-to-none. This does not mean you must choose either R or Python: Python supports most common statistical techniques (though R tends to support new developments in spatial statistics earlier) and many concepts learned from Python can be applied to the R world. Like R, Python also supports geographic data analysis and manipulation with packages such as shapely, geopandas, rasterio and xarray.
1.4 R’s spatial ecosystem
There are many ways to handle geographic data in R, with dozens of packages in the area.4 In this book we endeavor to teach the state-of-the-art in the field whilst ensuring that the methods are future-proof. Like many areas of software development, R’s spatial ecosystem is rapidly evolving (Figure 1.2). Because R is open source, these developments can easily build on previous work, by ‘standing on the shoulders of giants’, as Isaac Newton put it in 1675. This approach is advantageous because it encourages collaboration and avoids ‘reinventing the wheel’. The package sf (covered in Chapter 2), for example, builds on its predecessor sp.
A surge in development time (and interest) in ‘R-spatial’ has followed the award of a grant by the R Consortium for the development of support for simple features, an open-source standard and model to store and access vector geometries. This resulted in the sf package (covered in Section 2.2.1). Multiple places reflect the immense interest in sf. This is especially true for the R-sig-Geo Archives, a long-standing open access email list containing much R-spatial wisdom accumulated over the years.
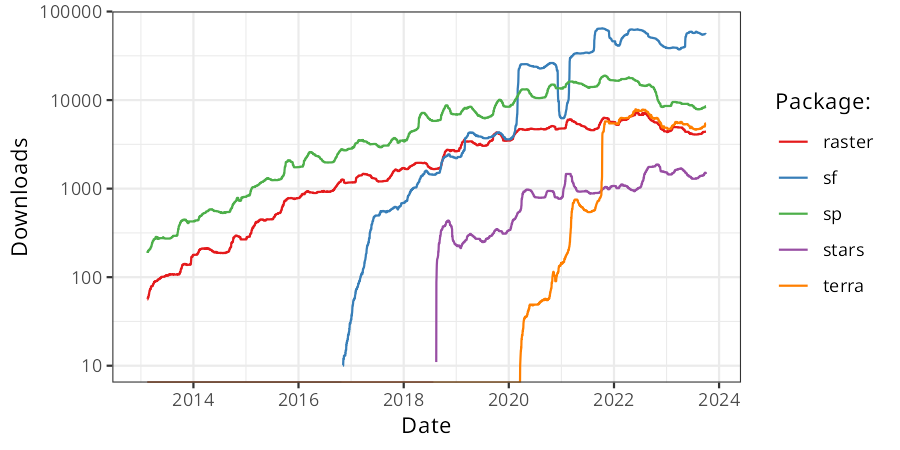
FIGURE 1.2: Downloads of selected R packages for working with geographic data from early 2013 to present. The y axis shows the average number of daily downloads from the popular cloud.r-project.org CRAN mirror with a 91-day rolling window (log scale).
It is noteworthy that shifts in the wider R community, as exemplified by the data processing package dplyr (released in 2014) influenced shifts in R’s spatial ecosystem. Alongside other packages that have a shared style and emphasis on ‘tidy data’ (including, e.g., ggplot2), dplyr was placed in the tidyverse ‘metapackage’ in late 2016. The tidyverse approach, with its focus on long-form data and fast intuitively named functions, has become immensely popular. This has led to a demand for ‘tidy geographic data’ which has been partly met by sf. An obvious feature of the tidyverse is the tendency for packages to work in harmony. There is no equivalent geoverse, but there are attempts at harmonization between packages hosted in the r-spatial organization and a growing number of packages use sf (Table 1.2).
| Package | Downloads |
|---|---|
| r5r | 4774 |
| stars | 1354 |
| leafem | 1013 |
| spdep | 881 |
| tmap | 873 |
A parallel group of developments relates to the rspatial set of packages.5 Its main member is the terra package for spatial raster handling (see Section 2.3.2).
1.5 The history of R-spatial
There are many benefits of using recent spatial packages such as sf, but it also important to be aware of the history of R’s spatial capabilities: many functions, use-cases and teaching material are contained in older packages. These can still be useful today, provided you know where to look.
R’s spatial capabilities originated in early spatial packages in the S language (Bivand and Gebhardt 2000). The 1990s saw the development of numerous S scripts and a handful of packages for spatial statistics. By the year 2000 there were R packages for various spatial methods, including “point pattern analysis, geostatistics, exploratory spatial data analysis and spatial econometrics” (Bivand and Neteler 2000). Some of these, notably spatial, sgeostat and splancs are still available on CRAN (B. S. Rowlingson and Diggle 1993; B. Rowlingson and Diggle 2017; Venables and Ripley 2002; Majure and Gebhardt 2016).
A subsequent article in R News (the predecessor of The R Journal) contained an overview of spatial statistical software in R at the time, much of which was based on previous code written for S/S-PLUS (Ripley 2001). This overview described packages for spatial smoothing and interpolation, including akima and geoR (Akima and Gebhardt 2016; Jr and Diggle 2016), and point pattern analysis, including splancs (B. Rowlingson and Diggle 2017) and spatstat (Baddeley, Rubak, and Turner 2015).
The following R News issue (Volume 1/3) put spatial packages in the spotlight again, with a more detailed introduction to splancs and a commentary on future prospects regarding spatial statistics (Bivand 2001). Additionally, the issue introduced two packages for testing spatial autocorrelation that eventually became part of spdep (Bivand 2017). Notably, the commentary mentions the need for standardization of spatial interfaces, efficient mechanisms for exchanging data with GIS, and handling of spatial metadata such as coordinate reference systems (CRS).
maptools (written by Nicholas Lewin-Koh; Bivand and Lewin-Koh (2017)) is another important package from this time. Initially maptools just contained a wrapper around shapelib and permitted the reading of ESRI Shapefiles into geometry nested lists. The corresponding and nowadays obsolete S3 class called “Map” stored this list alongside an attribute data frame. The work on the “Map” class representation was nevertheless important since it directly fed into sp prior to its publication on CRAN.
In 2003 Roger Bivand published an extended review of spatial packages. He proposed a class system to support the “data objects offered by GDAL”, including ‘fundamental’ point, line, polygon, and raster types. Furthermore, it suggested interfaces to external libraries should form the basis of modular R packages (Bivand 2003). To a large extent these ideas were realized in the packages rgdal and sp. These provided a foundation for spatial data analysis with R, as described in Applied Spatial Data Analysis with R (ASDAR) (Bivand, Pebesma, and Gómez-Rubio 2013), first published in 2008. Ten years later, R’s spatial capabilities have evolved substantially but they still build on ideas set-out by Bivand (2003): interfaces to GDAL and PROJ, for example, still power R’s high-performance geographic data I/O and CRS transformation capabilities (see Chapters 7 and 8, respectively).
rgdal, released in 2003, provided GDAL bindings for R which greatly enhanced its ability to import data from previously unavailable geographic data formats. The initial release supported only raster drivers but subsequent enhancements provided support for coordinate reference systems (via the PROJ library), reprojections and import of vector file formats (see Chapter 8 for more on file formats). Many of these additional capabilities were developed by Barry Rowlingson and released in the rgdal codebase in 2006 (see B. Rowlingson et al. (2003) and the R-help email list for context).
sp, released in 2005, overcame R’s inability to distinguish spatial and non-spatial objects (Pebesma and Bivand 2005). sp grew from a workshop in Vienna in 2003 and was hosted at SourceForge before migrating to R-Forge, and then to GitHub. Prior to 2005, geographic coordinates were generally treated like any other number. sp changed this with its classes and generic methods supporting points, lines, polygons and grids, and attribute data.
sp stores information such as bounding box, coordinate reference system and attributes in slots in Spatial objects using the S4 class system,
enabling data operations to work on geographic data (see Section 2.2.2).
Further, sp provides generic methods such as summary() and plot() for geographic data.
In the following decade, sp classes rapidly became popular for geographic data in R and the number of packages that depended on it increased from around 20 in 2008 to over 100 in 2013 (Bivand, Pebesma, and Gómez-Rubio 2013).
By 2019 more than 500 packages imported sp, although this number is falling as developers switch to sf and other packages.
Prominent R packages using sp include: gstat, for spatial and spatio-temporal geostatistics; and geosphere, for spherical trigonometry (Pebesma and Graeler 2023; Hijmans 2016).
While rgdal and sp solved many spatial issues, it was not until rgeos was developed during a Google Summer of Code project in 2010 (Bivand and Rundel 2023) that geometry operations could be undertaken on sp objects.
Functions such as gIntersection() enabled users to find spatial relationships between geographic objects and to modify their geometries (see Chapter 5 for details on geometric operations with sf).
A limitation of the sp ecosystem was its limited support for raster data. This was overcome by raster, first released in 2010 (Hijmans 2023b). raster’s class system and functions enabled a range of raster operations, capabilities now implemented in the terra package, which supersedes raster, as outlined in Section 2.3. An important capability of raster and terra is their ability to work with datasets that are too large to fit into RAM also supports off-disk operations. raster and terra also supports map algebra, as described in Section 4.3.2.
In parallel with these developments of class systems and methods came the support for R as an interface to dedicated GIS software. GRASS (Bivand 2000) and follow-on packages spgrass6, rgrass7 and rgrass (for GRASS GIS GIS 6, 7, 7 + 8 respectively) were prominent examples in this direction (Bivand 2016a, 2016b, 2023). Other examples of bridges between R and GIS include RSAGA (Brenning, Bangs, and Becker 2022, first published in 2008), RPyGeo (Brenning 2012a, first published in 2008), RQGIS (Muenchow, Schratz, and Brenning 2017, first published in 2016), and more (see Chapter 10).
Visualization was not a focus initially, with the bulk of R-spatial development focused on analysis and geographic operations.
sp provided methods for map making using both the base and lattice plotting system but demand was growing for advanced map making capabilities.
RgoogleMaps first released in 2009, allowed to overlay R spatial data on top of ‘basemap’ tiles from online services such as Google Maps or OpenStreetMap (Loecher and Ropkins 2015).
It was followed by the ggmap package that added similar ‘basemap’ tiles capabilities to ggplot2 (Kahle and Wickham 2013).
Though ggmap facilitated map-making with ggplot2, its utility was limited by the need to fortify spatial objects, which means converting them into long data frames.
While this works well for points it is computationally inefficient for lines and polygons, since each coordinate (vertex) is converted into a row, leading to huge data frames to represent complex geometries.
Although geographic visualization tended to focus on vector data, raster visualization is supported in raster and received a boost with the release of rasterVis, which is described in a book on the subject of spatial and temporal data visualization (Lamigueiro 2018).
Since then map making in R has become a hot topic, with dedicated packages such as tmap, leaflet, rayshader and mapview gaining popularity, as highlighted in Chapter 9.
Since 2018, when the First Edition of Geocomputation with R was published, the development of geographic R packages has accelerated. terra, a successor of the raster package, was firstly released in 2020 (Hijmans 2023c), bringing several benefits to R users working with raster datasets: it is faster and has more a straightforward user interface than its predecessor, as described in Section 2.3.
In mid-2021, a substantial (and in some cases breaking) change was made to the sf package by incorporating spherical geometry calculations. Since then, by default, many spatial operations on data with geographic CRSs use the S2 spherical geometry engine as a back-end, as described in Section 2.2.9. Additional ways of representing and working with geographic data in R since 2018 also include the stars and lidR packages. stars, which integrates closely with sf, handles raster and vector data cubes (Pebesma 2021). lidR processes of airborne LiDAR (Light Detection and Ranging) point clouds (Roussel et al. 2020).
This modernization had several motivations, including the emergence of new technologies and standard, and the impacts from spatial software development outside of the R environment (Bivand 2021). The most important external factor affecting most spatial software, including R spatial packages, were the major updates, including many breaking changes to the PROJ library that had begun in 2018. Most importantly, these changes forced the replacement of ‘proj-string’ representations of coordinate reference systems with ‘Well Known Text’, as described in Section 2.4 and Chapter 7.
Since 2018, the progress of spatial visualization tools in R has been related to a few factors.
Firstly, new types of spatial plots were developed, including the rayshader package offering a combination of raytracing and multiple hill-shading methods to produce 2D and 3D data visualizations (Morgan-Wall 2021).
Secondly, ggplot2 gained new spatial capabilities, mostly thanks to the ggspatial package that adds some spatial visualization elements, including scale bars and north arrows (Dunnington 2021) and gganimate that enables smooth and customizable spatial animations (Pedersen and Robinson 2020).
Thirdly, performance of visualizing large spatial dataset was improved.
This especially relates to automatic plotting of downscaled rasters in tmap and the possibility of using high-performance interactive rendering platforms in the mapview package, such as "leafgl" and "mapdeck".
Lastly, some of the existing mapping tools have been rewritten to minimize dependencies, improve user interface, or allow for easier creation of extensions.
This includes the mapsf package (successor of cartography) (Giraud 2021) and version 4 of the tmap package, in which most of the internal code was revised.
In late 2021, the planned retirement of rgdal, rgeos and maptools was announced on the R-sig-Geo mailing list by Roger Bivand. This retirement at the end of 2023 has had a large impact on existing workflows applying these packages, but also influenced the packages that depend on them. Therefore, Bivand’s suggestion recommended switching to more modern tools, including sf and terra, as explained in this book’s next chapters.
1.6 Exercises
E1. Think about the terms ‘GIS’, ‘GDS’ and ‘geocomputation’ described above. Which (if any) best describes the work you would like to do using geo* methods and software and why?
E2. Provide three reasons for using a scriptable language such as R for geocomputation instead of using a graphical user interface (GUI) based GIS such as QGIS.
E3. In the year 2000 Stan Openshaw wrote that geocomputation involved “practical work that is beneficial or useful” to others. Think about a practical problem and possible solutions that could be informed with new evidence derived from the analysis, visualization or modelling of geographic data. With a pen and paper (or computational equivalent) sketch inputs and possible outputs illustrating how geocomputation could help.