11 Scripts, algorithms and functions
Prerequisites
This chapter has minimal software prerequisites as it primarily uses base R. Only, the sf package is used to check the results of an algorithm we will develop to calculate the area of polygons. In terms of prior knowledge, this chapter assumes you have an understanding of the geographic classes introduced in Chapter 2 and how they can be used to represent a wide range of input file formats (see Chapter 8).
11.1 Introduction
Chapter 1 established that geocomputation is not only about using existing tools, but developing new ones, “in the form of shareable R scripts and functions”. This chapter teaches these building blocks of reproducible code. It also introduces low-level geometric algorithms, of the type used in Chapter 10. Reading it should help you to understand how such algorithms work and to write code that can be used many times, by many people, on multiple datasets. The chapter cannot, by itself, make you a skilled programmer. Programming is hard and requires plenty of practice (Abelson, Sussman, and Sussman 1996):
To appreciate programming as an intellectual activity in its own right you must turn to computer programming; you must read and write computer programs — many of them.
There are strong reasons for learning to program. Although this chapter does not teach programming itself — see resources such as Wickham (2019), Gillespie and Lovelace (2016), and Xiao (2016) which teach programming in R and other languages — it does provide some starting points, focused on geometry data, that could form a good foundation for developing programming skills.
The chapter also demonstrates and highlights the importance of reproducibility. The advantages of reproducibility go beyond allowing others to replicate your work: reproducible code is often better in every way than code written to be run only once, including in terms of computational efficiency, ‘scalability’ (the capability of code to run on large datasets) and ease of adapting and maintaining it.
Scripts are the basis of reproducible R code, a topic covered in Section 11.2.
Algorithms are recipes for modifying inputs using a series of steps, resulting in an output, as described in Section 11.3.
To ease sharing and reproducibility, algorithms can be placed into functions.
That is the topic of Section 11.4.
The example of finding the centroid of a polygon will be used to tie these concepts together.
Chapter 5 already introduced a centroid function st_centroid(), but this example highlights how seemingly simple operations are the result of comparatively complex code, affirming the following observation (Wise 2001):
One of the most intriguing things about spatial data problems is that things which appear to be trivially easy to a human being can be surprisingly difficult on a computer.
The example also reflects a secondary aim of the chapter which, following Xiao (2016), is “not to duplicate what is available out there, but to show how things out there work”.
11.2 Scripts
If functions distributed in packages are the building blocks of R code, scripts are the glue that holds them together.
Scripts should be stored and executed in a logical order to create reproducible workflows, manually or with workflow automation tools such as targets (Landau 2021).
If you are new to programming scripts may seem intimidating when you first encounter them, but they are simply plain text files.
Scripts are usually saved as a file with an extension representing the language they contain, such as .py for scripts written in Python or .rs for scripts written in Rust.
R scripts should be saved with a .R extension and named to reflect what they do.
An example is 11-hello.R, a script file stored in the code folder of the book’s repository.
11-hello.R is a simple script containing only two lines of code, one of which is a comment:
# Aim: provide a minimal R script
print("Hello geocompr")The contents of this script are not particularly exciting but they demonstrate the point: scripts do not need to be complicated.
Saved scripts can be called and executed in their entirety from the R command line with the source() function, as demonstrated below.
The output of this command shows that the comment is ignored but print() command is executed:
source("code/11-hello.R")
#> [1] "Hello geocompr"You can also call R scripts from system command line shells such as bash and PowerShell, assuming that the RScript executable is configured so it is available, for example as follows:
There are no strict rules on what can and cannot go into script files and nothing to prevent you from saving broken, non-reproducible code.
Lines of code that do not contain valid R should be commented out, by adding a # to the start of the line, to prevent errors, as shown in line 1 of the 11-hello.R script.
There are, however, some conventions worth following:
- Write the script in order: just like the script of a film, scripts should have a clear order such as ‘setup’, ‘data processing’ and ‘save results’ (roughly equivalent to ‘beginning’, ‘middle’ and ‘end’ in a film).
- Add comments to the script so other people (and your future self) can understand it
At a minimum, a comment should state the purpose of the script (see Figure 11.1) and (for long scripts) divide it into sections.
This can be done in RStudio, for example, with the shortcut
Ctrl+Shift+R, which creates ‘foldable’ code section headings - Above all, scripts should be reproducible: self-contained scripts that will work on any computer are more useful than scripts that only run on your computer, on a good day. This involves attaching required packages at the beginning, reading-in data from persistent sources (such as a reliable website) and ensuring that previous steps have been taken79
It is hard to enforce reproducibility in R scripts, but there are tools that can help. By default, RStudio ‘code-checks’ R scripts and underlines faulty code with a red wavy line, as illustrated below:
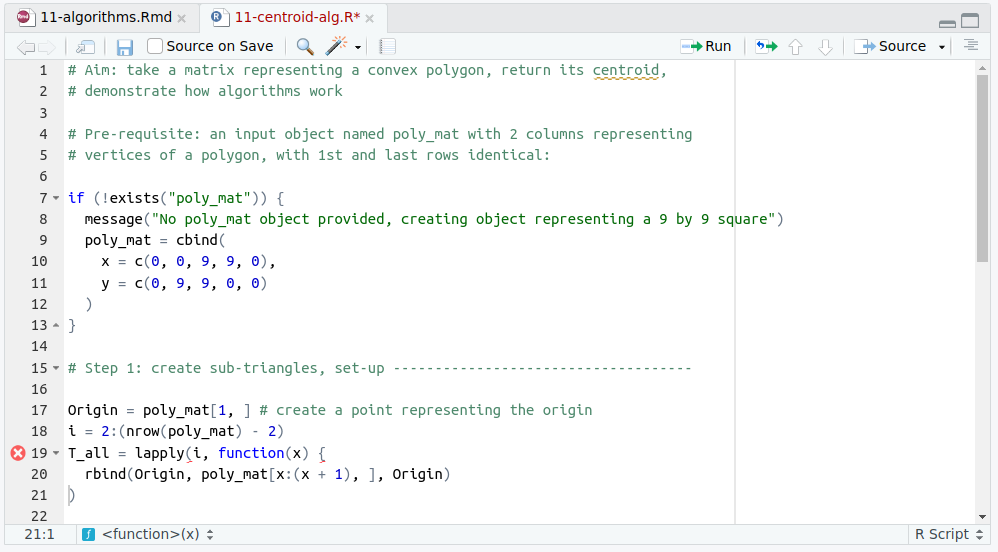
FIGURE 11.1: Code checking in RStudio. This example, from the script 11-centroid-alg.R, highlights an unclosed curly bracket on line 19.
reprex() tests lines of R code to check if they are reproducible, and provides markdown output to facilitate communication on sites such as GitHub.
See the web page reprex.tidyverse.org for details.
The contents of this section apply to any type of R script. A particular consideration with scripts for geocomputation is that they tend to have external dependencies, such as the GDAL dependency needed for core R packages for working with geographic data, which we made heavy use of in Chapter 8 for data import and export. GIS software dependencies may be needed to run more specialist geoalgorithms, as outlined in Chapter 10. Scripts for working with geographic data also often require input datasets to be available specific formats. Such dependencies should be mentioned as comments or suitable place in the project of which it is a part, or described as dependencies with tools such as the renv package or Docker.
‘Defensive’ programming techniques and good error messages can save time by checking for dependencies and communicating with users if certain requirements are not met.
If statements, implemented with if () in R, can be used to send messages or run lines of code if, and only if, certain conditions are met.
The following lines of code, for example, send a message to users if a certain file is missing:
if (!file.exists("required_geo_data.gpkg")) {
message("No file, required_geo_data.gpkg is missing!")
}
#> No file, required_geo_data.gpkg is missing!The work undertaken by the 11-centroid-alg.R script is demonstrated in the reproducible example below, which creates a pre-requisite object named poly_mat, representing a square with sides 9 units in length.
This example shows that source() works with URLs, assuming you have an internet connection.
If you do not, the same script can be called with source("code/11-centroid-alg.R"), assuming that you have previously downloaded the github.com/geocompx/geocompr repository and that you are running R from the geocompr folder.
poly_mat = cbind(
x = c(0, 9, 9, 0, 0),
y = c(0, 0, 9, 9, 0)
)
# Short URL to code/11-centroid-alg.R in the geocompr repo
source("https://t.ly/0nzj")#> [1] "The area is: 81"
#> [1] "The coordinates of the centroid are: 4.5, 4.5"11.3 Geometric algorithms
Algorithms can be understood as the computing equivalent of a baking recipe. They are a complete set of instructions which, when undertaken on the inputs result in useful/tasty outcomes. Inputs are ingredients such as flour and sugar in the case of baking, data and input parameters in the case of algorithms. And while tasty cakes may result from a baking recipe, successful algorithms should have computational outcomes with environmental/social/other benefits. Before diving into a reproducible example, the brief history below shows how algorithms relate to scripts (covered in Section 11.2) and functions (which can be used to generalize algorithms and make them more portable and easy-to-use, as we’ll see in Section 11.4).
The word “algorithm” originated in 9th century Baghdad with the publication of Hisab al-jabr w’al-muqabala, an early math textbook. The book was translated into Latin and became so popular that the author’s last name, al-Khwārizmī, “was immortalized as a scientific term: Al-Khwarizmi became Alchoarismi, Algorismi and, eventually, algorithm” (Bellos 2011). In the computing age, algorithm refers to a series of steps that solves a problem, resulting in a pre-defined output. Inputs must be formally defined in a suitable data structure (Wise 2001). Algorithms often start as flow charts or pseudocode showing the aim of the process before being implemented in code. To ease usability, common algorithms are often packaged inside functions, which may hide some or all of the steps taken (unless you look at the function’s source code, see Section 11.4).
Geoalgorithms, such as those we encountered in Chapter 10, are algorithms that take geographic data in and, generally, return geographic results (alternative terms for the same thing include GIS algorithms and geometric algorithms). That may sound simple but it is a deep subject with an entire academic field, Computational Geometry, dedicated to their study (Berg et al. 2008) and numerous books on the subject. O’Rourke (1998), for example, introduces the subject with a range of progressively harder geometric algorithms using reproducible and freely available C code.
An example of a geometric algorithm is one that finds the centroid of a polygon. There are many approaches to centroid calculation, some of which work only on specific types of spatial data. For the purposes of this section, we choose an approach that is easy to visualize: breaking the polygon into many triangles and finding the centroid of each of these, an approach discussed by Kaiser and Morin (1993) alongside other centroid algorithms (and mentioned briefly in O’Rourke 1998). It helps to further break down this approach into discrete tasks before writing any code (subsequently referred to as step 1 to step 4, these could also be presented as a schematic diagram or pseudocode):
- Divide the polygon into contiguous triangles
- Find the centroid of each triangle
- Find the area of each triangle
- Find the area-weighted mean of triangle centroids
These steps may sound straightforward, but converting words into working code requires some work and plenty of trial-and-error, even when the inputs are constrained: The algorithm will only work for convex polygons, which contain no internal angles greater than 180°, no star shapes allowed (packages decido and sfdct can triangulate non-convex polygons using external libraries, as shown in the algorithm vignette hosted at geocompx.org).
The simplest data structure representing a polygon is a matrix of x and y coordinates in which each row represents a vertex tracing the polygon’s border in order where the first and last rows are identical (Wise 2001). In this case, we will create a polygon with five vertices in base R, building on an example from GIS Algorithms (Xiao 2016 see github.com/gisalgs for Python code), as illustrated in Figure 11.2:
# generate a simple matrix representation of a polygon:
x_coords = c(10, 20, 12, 0, 0, 10)
y_coords = c(0, 15, 20, 10, 0, 0)
poly_mat = cbind(x_coords, y_coords)Now that we have an example dataset, we are ready to undertake step 1 outlined above.
The code below shows how this can be done by creating a single triangle (T1), that demonstrates the method; it also demonstrates step 2 by calculating its centroid based on the formula \(1/3(a + b + c)\) where \(a\) to \(c\) are coordinates representing the triangle’s vertices:
# create a point representing the origin:
Origin = poly_mat[1, ]
# create 'triangle matrix':
T1 = rbind(Origin, poly_mat[2:3, ], Origin)
C1 = (T1[1,] + T1[2,] + T1[3,]) / 3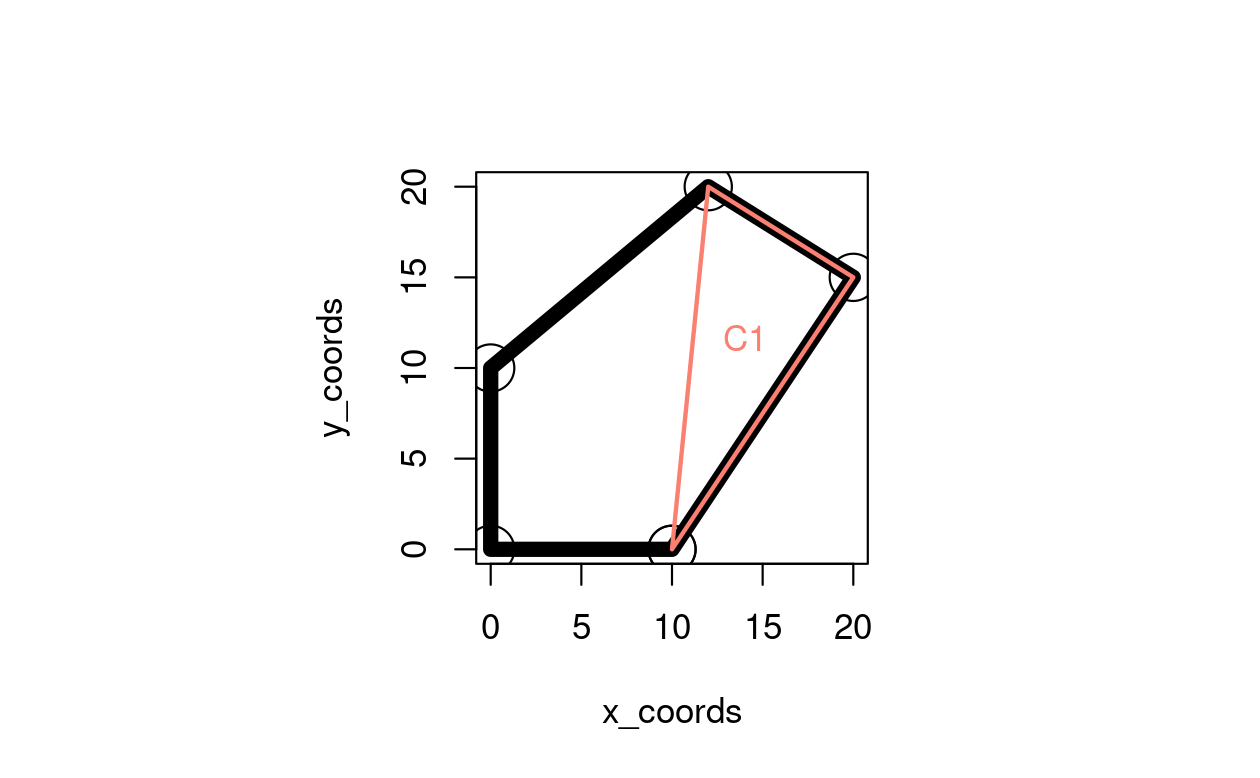
FIGURE 11.2: Illustration of polygon centroid calculation problem.
Step 3 is to find the area of each triangle, so a weighted mean accounting for the disproportionate impact of large triangles is accounted for. The formula to calculate the area of a triangle is as follows (Kaiser and Morin 1993):
\[ \frac{A_x ( B_y − C_y ) + B_x ( C_y − A_y ) + C_x ( A_y − B_y )}{ 2 } \]
Where \(A\) to \(C\) are the triangle’s three points and \(x\) and \(y\) refer to the x and y dimensions.
A translation of this formula into R code that works with the data in the matrix representation of a triangle T1 is as follows (the function abs() ensures a positive result):
# calculate the area of the triangle represented by matrix T1:
abs(T1[1, 1] * (T1[2, 2] - T1[3, 2]) +
T1[2, 1] * (T1[3, 2] - T1[1, 2]) +
T1[3, 1] * (T1[1, 2] - T1[2, 2])) / 2
#> [1] 85This code chunk outputs the correct result.80 The problem is that code is clunky and must by re-typed if we want to run it on another triangle matrix. To make the code more generalizable, we will see how it can be converted into a function in Section 11.4.
Step 4 requires steps 2 and 3 to be undertaken not just on one triangle (as demonstrated above) but on all triangles.
This requires iteration to create all triangles representing the polygon, illustrated in Figure 11.3.
lapply() and vapply() are used to iterate over each triangle here because they provide a concise solution in base R:81
i = 2:(nrow(poly_mat) - 2)
T_all = lapply(i, function(x) {
rbind(Origin, poly_mat[x:(x + 1), ], Origin)
})
C_list = lapply(T_all, function(x) (x[1, ] + x[2, ] + x[3, ]) / 3)
C = do.call(rbind, C_list)
A = vapply(T_all, function(x) {
abs(x[1, 1] * (x[2, 2] - x[3, 2]) +
x[2, 1] * (x[3, 2] - x[1, 2]) +
x[3, 1] * (x[1, 2] - x[2, 2]) ) / 2
}, FUN.VALUE = double(1))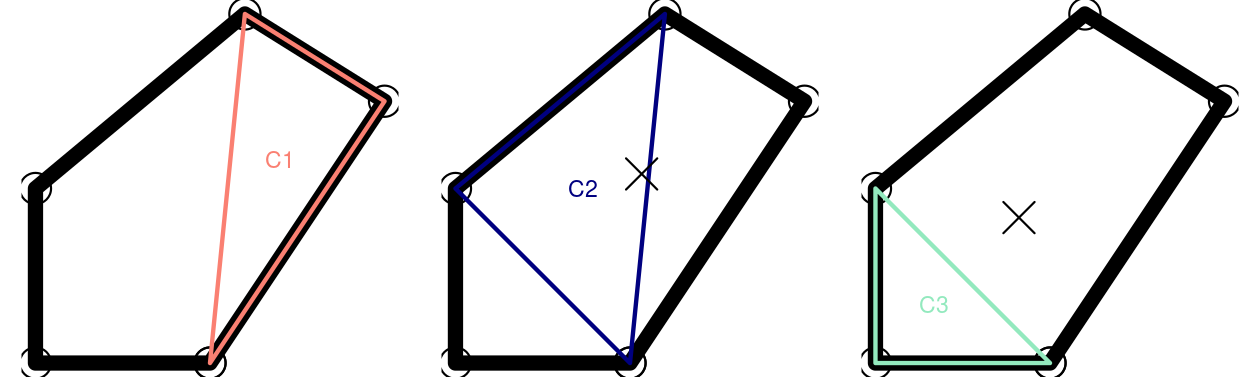
FIGURE 11.3: Illustration of iterative centroid algorithm with triangles. The X represents the area-weighted centroid in iterations 2 and 3.
We are now in a position to complete step 4 to calculate the total area with sum(A) and the centroid coordinates of the polygon with weighted.mean(C[, 1], A) and weighted.mean(C[, 2], A) (exercise for alert readers: verify these commands work).
To demonstrate the link between algorithms and scripts, the contents of this section have been condensed into 11-centroid-alg.R.
We saw at the end of Section 11.2 how this script can calculate the centroid of a square.
The great thing about scripting the algorithm is that it works on the new poly_mat object (see exercises below to verify these results with reference to st_centroid()):
source("code/11-centroid-alg.R")
#> [1] "The area is: 245"
#> [1] "The coordinates of the centroid are: 8.83, 9.22"The example above shows that low-level geographic operations can be developed from first principles with base R.
It also shows that if a tried-and-tested solution already exists, it may not be worth re-inventing the wheel:
if we aimed only to find the centroid of a polygon, it would have been quicker to represent poly_mat as an sf object and use the pre-existing sf::st_centroid() function instead.
However, the great benefit of writing algorithms from 1st principles is that you will understand every step of the process, something that cannot be guaranteed when using other peoples’ code.
A further consideration is performance: R may be slow compared with low-level languages such as C++ for number crunching (see Section 1.3) and optimization is difficult.
If the aim is to develop new methods, computational efficiency should not be prioritized.
This is captured in the saying “premature optimization is the root of all evil (or at least most of it) in programming” (Knuth 1974).
Algorithm development is hard. This should be apparent from the amount of work that has gone into developing a centroid algorithm in base R that is just one, rather inefficient, approach to the problem with limited real-world applications (convex polygons are uncommon in practice). The experience should lead to an appreciation of low-level geographic libraries such as GEOS and CGAL (the Computational Geometry Algorithms Library) which not only run fast but work on a wide range of input geometry types. A great advantage of the open source nature of such libraries is that their source code is readily available for study, comprehension and (for those with the skills and confidence) modification.82
11.4 Functions
Like algorithms, functions take an input and return an output. Functions, however, refer to the implementation in a particular programming language, rather than the ‘recipe’ itself. In R, functions are objects in their own right, that can be created and joined together in a modular fashion. We can, for example, create a function that undertakes step 2 of our centroid generation algorithm as follows:
t_centroid = function(x) {
(x[1, ] + x[2, ] + x[3, ]) / 3
}The above example demonstrates two key components of functions:
1) the function body, the code inside the curly brackets that define what the function does with the inputs; and 2) the arguments, the list of arguments the function works with — x in this case (the third key component, the environment, is beyond the scope of this section).
By default, functions return the last object that has been calculated (the coordinates of the centroid in the case of t_centroid()).83
The function now works on any inputs you pass it, as illustrated in the below command which calculates the area of the 1st triangle from the example polygon in the previous section (see Figure 11.3).
t_centroid(T1)
#> x_coords y_coords
#> 14.0 11.7We can also create a function to calculate a triangle’s area, which we will name t_area():
t_area = function(x) {
abs(
x[1, 1] * (x[2, 2] - x[3, 2]) +
x[2, 1] * (x[3, 2] - x[1, 2]) +
x[3, 1] * (x[1, 2] - x[2, 2])
) / 2
}Note that after the function’s creation, a triangle’s area can be calculated in a single line of code, avoiding duplication of verbose code:
functions are a mechanism for generalizing code.
The newly created function t_area() takes any object x, assumed to have the same dimensions as the ‘triangle matrix’ data structure we’ve been using, and returns its area, as illustrated on T1 as follows:
t_area(T1)
#> [1] 85We can test the generalizability of the function by using it to find the area of a new triangle matrix, which has a height of 1 and a base of 3:
A useful feature of functions is that they are modular.
Provided that you know what the output will be, one function can be used as the building block of another.
Thus, the functions t_centroid() and t_area() can be used as sub-components of a larger function to do the work of the script 11-centroid-alg.R: calculate the area of any convex polygon.
The code chunk below creates the function poly_centroid() to mimic the behavior of sf::st_centroid() for convex polygons.84
poly_centroid = function(poly_mat) {
Origin = poly_mat[1, ] # create a point representing the origin
i = 2:(nrow(poly_mat) - 2)
T_all = lapply(i, function(x) {rbind(Origin, poly_mat[x:(x + 1), ], Origin)})
C_list = lapply(T_all, t_centroid)
C = do.call(rbind, C_list)
A = vapply(T_all, t_area, FUN.VALUE = double(1))
c(weighted.mean(C[, 1], A), weighted.mean(C[, 2], A))
}
poly_centroid(poly_mat)
#> [1] 8.83 9.22Functions, such as poly_centroid(), can further be extended to provide different types of output.
To return the result as an object of class sfg, for example, a ‘wrapper’ function can be used to modify the output of poly_centroid() before returning the result:
poly_centroid_sfg = function(x) {
centroid_coords = poly_centroid(x)
sf::st_point(centroid_coords)
}We can verify that the output is the same as the output from sf::st_centroid() as follows:
poly_sfc = sf::st_polygon(list(poly_mat))
identical(poly_centroid_sfg(poly_mat), sf::st_centroid(poly_sfc))
#> [1] TRUE11.5 Programming
In this chapter we have moved quickly, from scripts to functions via the tricky topic of algorithms. Not only have we discussed them in the abstract, but we have also created working examples of each to solve a specific problem:
- The script
11-centroid-alg.Rwas introduced and demonstrated on a ‘polygon matrix’ - The individual steps that allowed this script to work were described as an algorithm, a computational recipe
- To generalize the algorithm we converted it into modular functions which were eventually combined to create the function
poly_centroid()in the previous section
Each of these may seem straightforward. However, skillful programming is complex and involves combining each element — scripts, algorithms and functions — into a system, with efficiency and style. The outcome should be robust and user-friendly tools that other people can use. If you are new to programming, as we expect most people reading this book will be, being able to follow and reproduce the results in the preceding sections is a major achievement. Programming takes many hours of dedicated study and practice before you become proficient.
The challenge facing developers aiming to implement new algorithms in an efficient way is put in perspective by considering the amount work that has gone into creating a simple function that is not intended for use in production: in its current state, poly_centroid() fails on most (non-convex) polygons!
This raises the question: how to generalize the function?
Two options are (1) to find ways to triangulate non-convex polygons (a topic covered in the online algorithm article that supports this chapter) and (2) to explore other centroid algorithms that do not rely on triangular meshes.
A wider question is: is it worth programming a solution at all when high performance algorithms have already been implemented and packaged in functions such as st_centroid()?
The reductionist answer in this specific case is ‘no’.
In the wider context, and considering the benefits of learning to program, the answer is ‘it depends’.
With programming, it’s easy to waste hours trying to implement a method, only to find that someone has already done the hard work.
You can understand this chapter as a stepping stone towards geometric algorithm programming wizardry.
However, it can also be seen as a lesson in when to try to program a generalized solution, and when to use existing higher-level solutions.
There will surely be occasions when writing new functions is the best way forward, but there will also be times when using functions that already exist is the best way forward.
“Do not reinvent the wheel” applies as much, if not more, to programming than other walks of life. A bit of research and thinking at the outset of a project can help decide where programming time is best spent. Three principles can also help maximize use of your effort when writing code, whether it’s a simple script or package that is composed of hundreds of functions:
- DRY (don’t repeat yourself): minimize repetition of code and aim to use fewer lines of code to solve a particular problem. This principle is explained with reference to the use of functions to reduce code repetition in the Functions chapter of R for Data Science (Grolemund and Wickham 2016).
- KISS (keep it simple stupid): this principle suggests that simple solutions should be tried first and preferred over complex solutions, using dependencies where needed, and aiming to keep scripts concise. This principle is the computing analogy of the quote “things should be made as simple as possible, but no simpler”.
- Modularity: your code will be easier to maintain if it’s divided into well-defined pieces. A function should do only one thing but do this really well. If you function is becoming too long, think about splitting it into multiple small functions, each of which could be re-used for other purposes, supporting DRY and KISS principles.
We cannot guarantee that this chapter will instantly enable you to create perfectly formed functions for your work. We are, however, confident that its contents will help you decide when is an appropriate time to try (when no other existing functions solve the problem, when the programming task is within your capabilities and when the benefits of the solution are likely to outweigh the time costs of developing it). By using the principles above, in combination with the practical experience of working through the examples above, you will build your scripting, package-writing and programming skills. First steps towards programming can be slow (the exercises below should not be rushed) but the long-term rewards can be large.
11.6 Exercises
E1. Read the script 11-centroid-alg.R in the code folder of the book’s GitHub repository.
- Which of the best practices covered in Section 11.2 does it follow?
- Create a version of the script on your computer in an IDE such as RStudio (preferably by typing-out the script line-by-line, in your own coding style and with your own comments, rather than copy-pasting — this will help you learn how to type scripts). Using the example of a square polygon (e.g., created with
poly_mat = cbind(x = c(0, 9, 9, 0, 0), y = c(0, 0, 9, 9, 0))) execute the script line-by-line. - What changes could be made to the script to make it more reproducible?
- How could the documentation be improved?
E2. In the geometric algorithms section we calculated that the area and geographic centroid of the polygon represented by poly_mat was 245 and 8.8, 9.2, respectively.
- Reproduce the results on your own computer with reference to the script
11-centroid-alg.R, an implementation of this algorithm (bonus: type out the commands - try to avoid copy-pasting). - Are the results correct? Verify them by converting
poly_matinto ansfcobject (namedpoly_sfc) withst_polygon()(hint: this function takes objects of classlist()) and then usingst_area()andst_centroid().
E3. It was stated that the algorithm we created only works for convex hulls. Define convex hulls (see the geometry operations chapter) and test the algorithm on a polygon that is not a convex hull.
- Bonus 1: Think about why the method only works for convex hulls and note changes that would need to be made to the algorithm to make it work for other types of polygon.
- Bonus 2: Building on the contents of
11-centroid-alg.R, write an algorithm only using base R functions that can find the total length of linestrings represented in matrix form.
E4. In the functions section we created different versions of the poly_centroid() function that generated outputs of class sfg (poly_centroid_sfg()) and type-stable matrix outputs (poly_centroid_type_stable()).
Further extend the function by creating a version (e.g., called poly_centroid_sf()) that is type stable (only accepts inputs of class sf) and returns sf objects (hint: you may need to convert the object x into a matrix with the command sf::st_coordinates(x)).
- Verify if it works by running
poly_centroid_sf(sf::st_sf(sf::st_sfc(poly_sfc))) - What error message do you get when you try to run
poly_centroid_sf(poly_mat)?